如何用51单片机控制舵机加减速
本文最后更新于:2021年5月25日 凌晨
本文介绍使用如何51单片机控制舵机转动、加减速。
背景
这边文章是2016年上大学的时候写的,当时还不太懂做一个自己的网站,这篇文章写在了新浪博客上,排版阅读体验极差,重新把他整理处理出来,我的网站SEO还行,希望帮助更多人吧。
关于舵机,网络和书本上,很难找到详细的资料,我在2015年准备中国工程机器人暨国际公开赛的时候,做了一个采用舵机驱动的车型搬运机器人。由于当时知识有限,使用90系列51单片机,无法生成满足舵机精度要求的PWM,导致一个舵机的控制问题花费了近半年时间,并没有按照预期参加比赛(这个也真的不怪谁,不走个弯路)。
关于舵机的控制,我查询过一些资料,也请教过实验室的老师,但是结果都很不满意。舵机乱转,转速控制不精确,出现过各种问题。最终,硬是通过砸钱和砸时间(20块一个的PWM调制器不知道烧了多少- -!这个反正烧的不是我的,不心疼,但是90块一个舵机,加上60块一个的航模PWM舵机调制器还是砸了几百块进去的),和小伙伴通过实验,反复测试得到的结果,在这里分享出来,希望能帮助到感兴趣的铁子们。
舵机VS减速电机
我们知道,普通的减速电机也能转,舵机也能转,那这两个玩意儿有什么区别?
舵机,按照转动的方式,可以分为180°和360°连续旋转舵机。
180°舵机,顾名思义,就是只能旋转180°的舵机,我们可以通过PWM,精确的控制舵机旋转的角度。舵机从0°转到180°就不能继续转了,只能往回去转。另外,180°舵机无法调速,就是说,他始终会以最快速度,朝着你设定的角度旋转,直到旋转到目标角度刹停。因此,180°舵机在航模(控制飞机机翼)、双足机器人等很多场景中都有使用。
360°连续旋转舵机,顾名思义,就是可以朝着顺时针或者逆时针的方向,按照一定的速度一直转。可以通过PWM,控制舵机的旋转方向和速度,因此,也常常用于车型机器人的驱动上。360°舵机是无法控制旋转的角度的,只可以控制转和停、正转和反转以及转速。

360°舵机
减速电机,其实类似于360°连续旋转舵机,也常用小车的动力,就通电就一直转呗,断电就停呗。一般在某宝上面买的什么寻迹机器人,都是使用的减速电机。

减速电机和舵机的区别是:
- 硬件上:由于舵机内置有电路,因此我们做机器人设计电路的时候,仅需要设计好阴阳极和PWM信号输入的接口,非常简单。而普通的减速电机在设计电路的时候,则需要考虑到驱动芯片,就比较复杂了。淘宝上有现成的l298n驱动模块,买回来可以直接用了。
- 控制难度上,舵机对于PWM的精度要求非常高,而电机相对就不高。
- 价格方面:通常来说,舵机的价格是普通减速电机的很多倍,就记得之前带一个中学的学生参加机器人比赛,结果土豪学校用的舵机是300块一个的磁传感舵机。一个机器人,四个轮子就1200出去了,真的有钱。
- 转动效果上:减速电机转速高,扭矩小(说人话,如果车轻,跑的飞快,车重就跑不动)。舵机通常转速一般,扭矩大(说人话,车重车轻影响不大,始终能以一个固定的最大速度跑)。
- 个人认为最核心的差别:舵机是带刹停的。什么意思?如果减速电机需要停止转动,那就断电呗。但是假如一个小车在斜坡上,那减速电机就很难让小车刹住,断电就滑下去了嘛。反观舵机就比较容易实现了,只需要给一个固定的PWM就能刹住了。因为舵机的停,实际上是通电的,舵机本身是有力量保持住停止的这个状态的。快速响应的拖刹,给定高电平1.5ms的pwm,舵机会立刻刹住以及其充沛的动力这一点是减速电机做不到的。
PWM
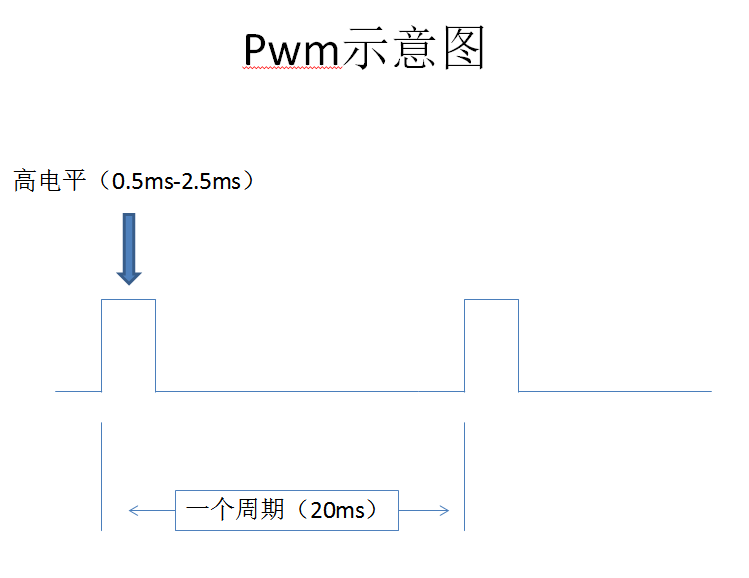
上一段中,我提到可以通过PWM,控制舵机转动。咱不做百度百科的搬运工,复制一堆看不懂的东西去解释概念。这里,只要知道,控制舵机,输出一个周期为20ms-30ms(最好20ms),高电平为0.5ms-2.5ms的信号即可,这个信号具体控制舵机的范围如下:
- 对于180°舵机而言,PWM高电平0.5-2.5ms每一个值对应一个角度,比如0.5ms对应转动到0°的位置,那1.5ms就对应转动到90°的位置,那2.5ms就对应转动到180°的位置。
- 对于360°舵机而言,PWM高电平0.5-1.5ms为正转区间,1.5-2.5ms为反转区间,1.5ms为舵机刹车点,调速的区间通常在1.5ms左右0.1ms宽度的范围内。举个例子,我使用的舵机,高电平0.5ms-1.37ms为以最大速度正转,正转的调速高电平区间为1.37ms-1.47ms(高电平越靠近1.5ms,舵机转速越慢),高电平1.53ms-2.5ms为以最大速度反转,反转调速高电平区间为:1.53-1.63ms(高电平越靠近1.5ms,舵机转速越慢),刹车高电平区间为:1.47-1.53ms。
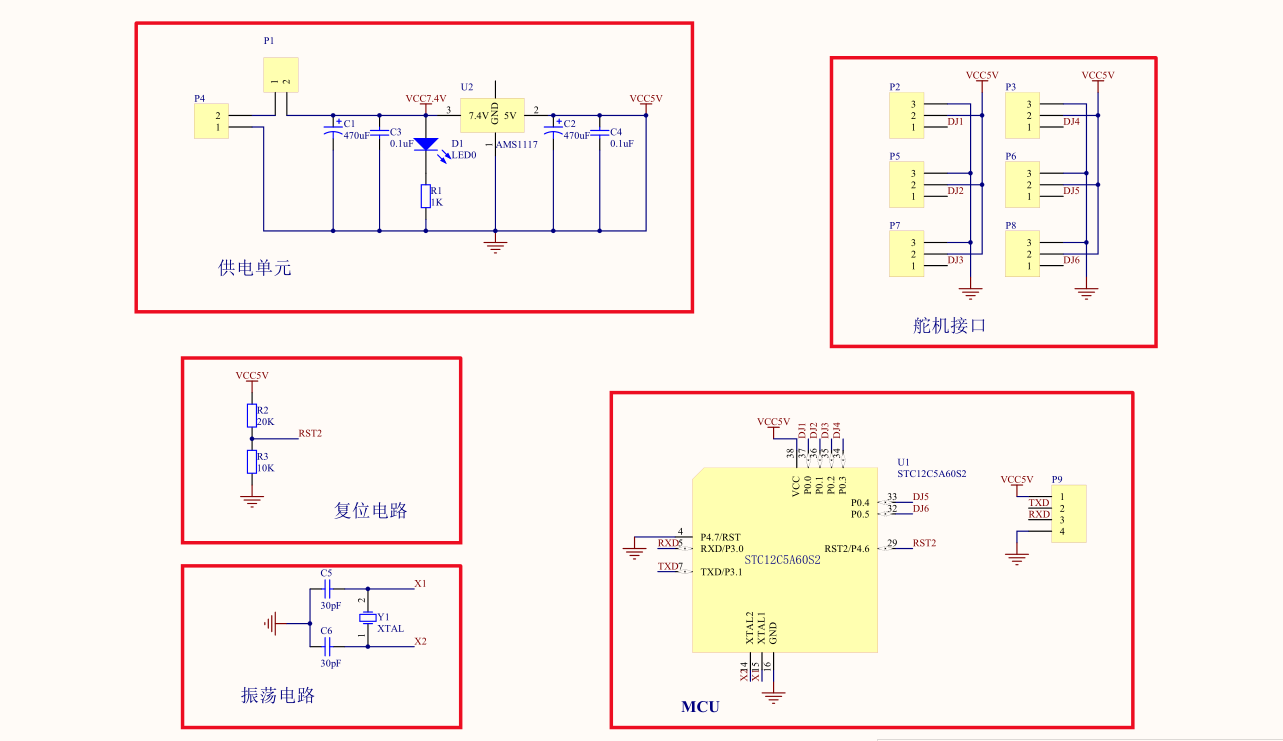
关于硬件上的设计,无非是保证供电的稳定和预留出PWM的接口,这里就不详细说明了,这里附上一张原理图,感兴趣的小伙伴可以研究一下。如果舵机反向电流很大,建议加上光耦隔离。
STC90系列能控制360°舵机吗?
这里对360°舵机如果通过51单片机的程序进行控制做详细的说明。如何使用51单片机产生我们需要的PWM?用定时器嘛!当然,我一开始也是这么想的,看看下面这段程序:
1 | |
看起来程序好像没有什么问题,ste360(n)这个函数,n就可以控制pwm高电平的时间,我设定定时器为每0.01ms进入一次中断,所以,要想得到1.5ms高电平,是不是n填写150就行了?答案是否定的,虽然程序逻辑是没有问题的,计算出来确实是1.5ms,但是现实中,很有可能是高电平为3ms+,为什么?这个问题困惑了我挺久,我和一位学长也讨论过,他认为:编译过程中,会将我们写的c文件,编译成汇编文件,然后转成机器语言,这个过程中可能会有误差。而我觉得,主要是晶振本身是有误差,其次,这样反复的进入中断,细小的误差会被无限的放大。最后,可能STC90系列的单片机设计有缺陷?我也不确定。因为同样是使用c,stm32上pwm的精度高的离谱。所以,使用STC90系列单片机(所有只有8位定时器的51单片机)来控制舵机,在我看来,是完全不可行的(我在很长一段时间里,极力优化代码,尝试过各种思路,但是结果只能说有提升,但是远远达不到控制舵机的要求)。当然了,还是要有点朋克精神,铁子们也可以自己写点小程序,打在示波器上看看,STC90系列的单片机能不能生成满足精度要求的PWM。
STC12系列能控制360°舵机吗?
不能用定时器,那怎么办?stc12系列的51单片机是自带8位pwm波形发生器,是不是可以用12系列的单片机实现?看程序:
1 | |
至于怎么调整pwm的高电平,修改上面CCAPXL和CCAPXH就可以了。是不是大功告成了呢?并没有!测试中我在示波器上发现,CCAPXH和CCAPXL的值每改变1,PWM高电平改变0.07ms左右。那么问题来了,在前面我提到过,360°舵机调速的区间,只有0.1ms(1.47-1.37=0.1),这个0.07,是可以让舵机实现正转反转,以及停止,但是没办法调速,循迹小车是需要控制车子两侧的轮子产生转速差来控制方向的,没法调速,就没法实现循迹。造成这个问题的原因是什么?8位的pwm模块,8位的pwm,上面程序中的注释中有这样一段:
1 | |
很清楚了吧!频率50HZ就是周期为20ms的PWM,8位的计数器,最大值是256,精度只能到0.07ms左右。
51单片机还能控制360°舵机吗?
那么是不是51单片机控制不了360°舵机呢?当然还是可以控制的,关键要选择一款好芯片。我最终发现了STC15W4K32S4系列单片机,这个系列的芯片带6路15位的PWM波形发生器,也有16位的定时器,自动重装模式能够实现8~16位的PWM。真的挺服STC的产品线的,他还有一个STC15系列单片机,不带PWM波形发生器。我真以为它15打头的全系都不带PWM波形发生器。
具体的程序在这里我就不列出来了,STC15W4K32S4自带pwm波形发生器的示例代码在官方文档的1056页,自动重装模式实现8~16位PWM的示例代码在官方文档的991页。
1 | |
所以,15位的PWM波形发生器,精度足够生成能够控制舵机的PWM了。
舵机供电很重要
前面所述,360°舵机的控制基本上能通过STC15W4K32S4系列单片机或者其他带15、16位PWM波形生成器的单片机解决,其实180°舵机相似,程序都是一样的。但是,尤其需要注意一下供电的问题,舵机要求的电压为6v-7.2v,你也许会发现5v其实舵机也能转,但是,低电压会带来很多未知的问题,比如舵机乱转,曾经有一段时间,我陷入舵机乱转的怪圈,我以为是我程序的问题,但是示波器显示没问题,以至于我以为是舵机坏了。实际上,是电池的问题,电池用的时间长了,电压不足,让舵机乱转。所以,建议使用航模sss电池,这个电池是11.2V的,使用降压模块,降成7.2v,给舵机供电,降成5v给单片机和传感器供电就行了。
尾巴(听我一句劝环节)
其实,舵机的控制,很简单,保证硬件上供电的稳定,保证软件上,能输出稳定、精度够高的PWM就足够了。个人觉得,这里面最大的坑,莫过于我们学习单片机的过程中,资料太过老旧。我学习51单片机那会儿,教程中使用的STC89、90系列的单片机,速度慢、外设少、价格高。也许当你抱着学习的心态去对待,没有太大的问题。但我相信,能看到这里的我相信,大概率是都对机器人制作感兴趣,刚学单片机(51),然后舵机控制遇到了问题;大概率都是希望通过单片机这样一个工具,去实现自己的一些创意,去做一些小玩意儿出来的。这种情况下,一款老旧的芯片,会给你带来很多不必要的麻烦。
PWM这一个场景为例,就像文本所述,从STC90系列单片机到STC12系列单片机,单片机本身外设太差导致PWM的精度始终达不到要求。当我使用
STC15W4K32S4让舵机稳定转起来的时候,心里面真的长舒一口气。当我学习STM32F103时,在示波器上看到无比精准的PWM时,除了吃惊,还有一点想笑,自己要是不学51单片机,直接用STM32,哪有这么多事?
但,听我一句劝吧:作为电子设计的初学者,选择一个性能合适的芯片真的很重要。注意,我这里说的是合适。比如本文提到的舵机控制的场景:
- 我们可以使用51单片机(
STC15W4K32S4)实现,前提是,你真的吃透51单片机,看得懂数据手册上不同寄存器是啥意思,STC15W4K32S4能输出精度够用的PWM。 - 我们可以使用arduino实现,那我们就不需要懂寄存器什么的,我们照着各种教程的程序,改一改就能实现,arduino能输出精度很够用的PWM。
- 我们可以使用STM32库开发实现,前提是,我们起码知道怎么调库函数,各种库函数是在干什么,STM32能输出精度完美的PWM。
- 我们可以使用STM32 HAL开发实现,配置一下功能,自动生成工程,稍微改动代码,就能实现,STM32能输出精度完美的PWM。
- 我们可以使用Mbed开发实现,前提是你英文水平还行,起码看得懂英文文档,Mbed支持的ARM芯片能输出精度完美的PWM。
- 我们可以使用树莓派实现。前提是你稍微掌握一点linux的基本知识,学一点python,甚至用C语言都能实现,树莓派能输出精度完美的PWM。
跳出舒适圈,是一件很不容易的事儿,特别是抛弃自己学会的东西,去学一个新的东西。我自己在最初的学习过程中,十分畏惧新的东西,所以想在这里把自己的经验分享出来:
- arduino上手真的比51单片机容易,做个简单的项目真的比51单片机好用。
- STM32也没有想象中那么复杂,51单片机学习需要10天,STM32一个月也就会用了吧。
- 树莓派没有什么上来就linux,听起来的那么复杂,linux和windows一样,就是个操作系统,我们在上面写程序跑就行了,python写代码比C语言简单多了。